Fabricators share that VTube-LASER is the easiest software system for measuring and qualifying tube and pipe fabrications.
They love the scores of embedded CNC bender communications protocols for new part configuration and automatic correction loops.

What they say: "What would have normally taken me one or two days of work was reduced to just one afternoon."
What they say: "VTube-LASER is freaking awesome software. I love this software!"
What they say: “I love the tutorial videos!"
Supports Multiple Measuring Systems
Measuring Tube and Pipe the Easy Way with VTube-LASER Connection to these measuring centers:
-
HEXAGON Absolute Arms
-
FARO ScanArms
-
Kreon Scan Arms
-
Revware MicroScribe Arms
-
Metronor LightPens
-
Revopoint (through OBJ files)
-
And any handheld scanner that creates an STL file
Links to More Information


-
VTube-LASER Space Objects – This is the major addition to VTube. It allows for measuring planes and holes in a tube shape.

-
VTube-LASER Shallow Bend Logic – This new logic allows VTube-LASER to find the center of shallow bends more accurately.
-
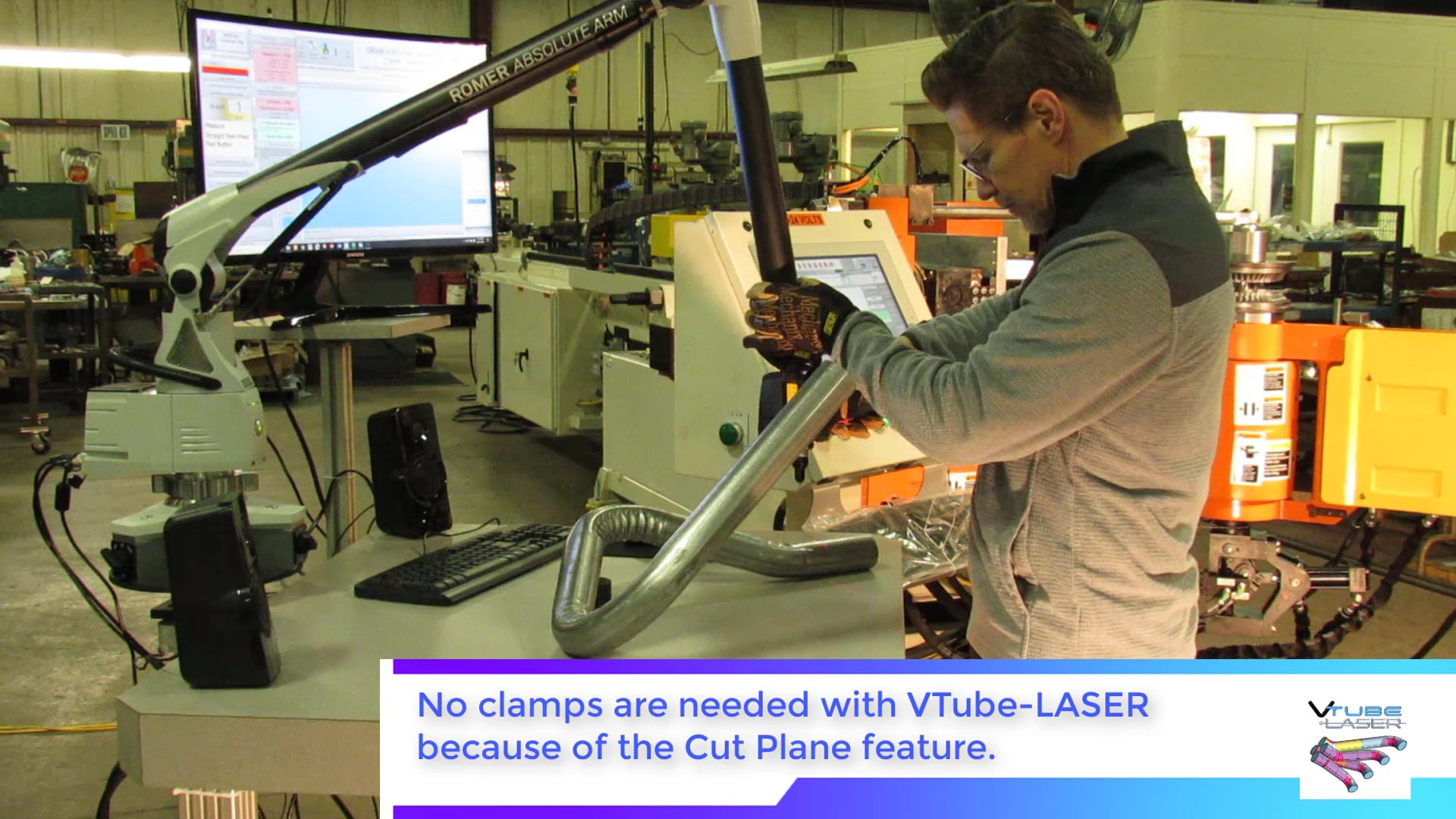
VTube-LASER LASER SCANNER Cut Planes and Leapfrog—This logic allows users to use the laser scanner for all operations. There is no longer a need to use the ball probe.
-
VTube-STEP Improved Import Accuracy – This logic significantly improved the model import accuracy.
Other Example New Additions
-
VTube-LASER has added CSM M3 Bender Corrections
-
VTube now automatically keeps up to 50 backups of the global configuration file.
-
VTube has added many new report tokens (variables) that allow for more reports, like a Laservision report.
-
VTube-LASER point cloud handling has changed to allow 100,000s of points rather than the old 20,000 points.
-
VTube now draws an offset plane model in Cut Planes when the offset is not equal to zero.
-
VTube can create Cut Planes from any Plane Space Objects.
-
VTube now shows Unicode characters correctly in reports. (This allows for Asian language characters in VTube reports.)
-
VTube now shows real-time bend angle feedback in the DRO (Digital Readout). As you measure through a part, it will always show the latest bend angle measured.
-
Measure and build flanges by measuring them with a probe.
-
Build complete tube layouts in SOLIDWORKS.
-
Now we have a new and FREE VTube Project Viewer.
-
VTube can now automatically create CSV reports for external processes at the measure complete and align event.
-
Best-fit Alignment 5 is 44 times faster than Best Fit Alignment 3 and often gives better results.
-
Now, combine multiple parts into one part.
-
Now trim a single tube into smaller sections to measure parts of the tube. (We call this Assembly Trim.)
-
New Alternative tolerances let you qualify a part using tighter tolerances than your customer requires.
-
We added round slot space objects to build and measure round slots.
-
Now you can import holes and round slots from a model in VTube-STEP.
-
Now, VTube-STEP also supports linear dimensions.
-
Tube Data Storage has been redesigned so VTube no longer exceeds the available memory with large history lists.
-
Use a new Coil Generator to generate coils.
-
We added a new Tangent Distance calculator.
-
We added a Bend Plane Clock tool that gives values oriented to any bend plane while moving the probe in space.
-
We added a tool that helps anticipate secondary process deformation. (This is for when parts are deformed after bending, like being crushed in a press.)
-
Now, store multiple default clear project states in System Options.
-
VTube can now automatically change the default project state when switching measuring device types.
-
The report window now displays either CSV or HTML type reports.
-
Now, you can transform Space Objects with tube transformations.
VTube-LASER videos
VTube-LASER videos

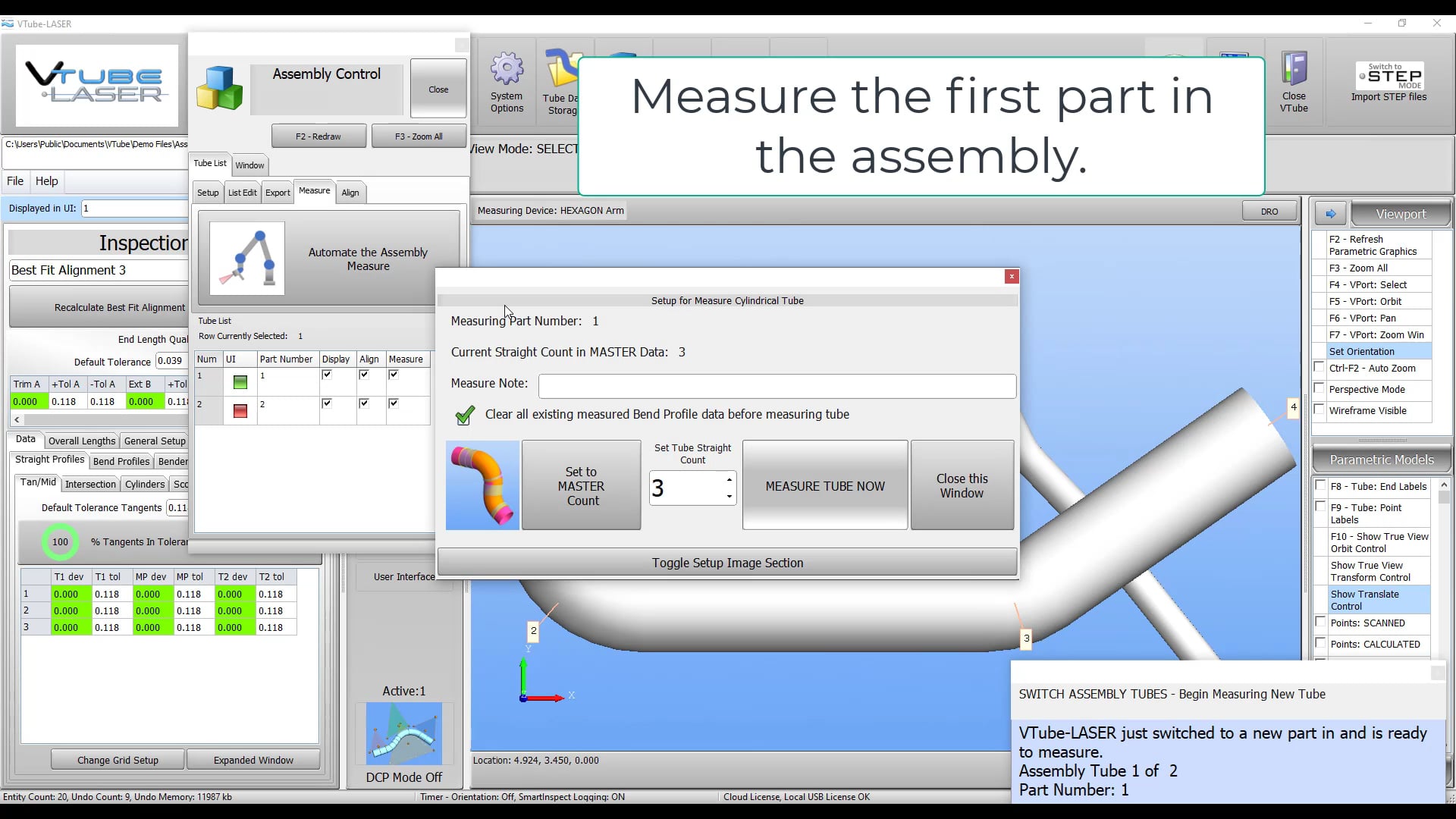
VTube-LASER v3 Full Assembly Alignment Control
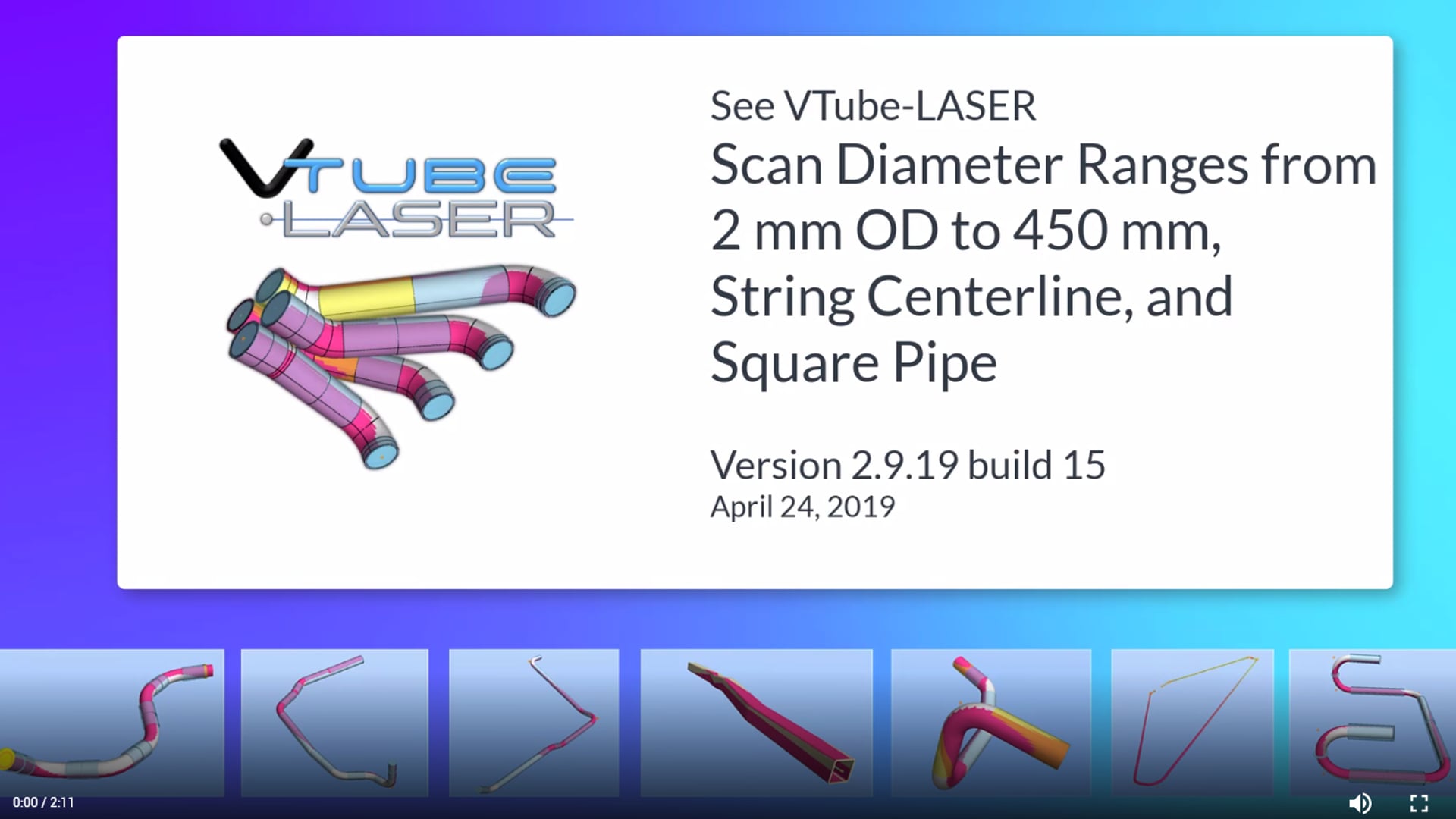
Demo of VTube-LASER Measuring from 2mm to 450mm Tube and Pipe

Measuring a Part with 180-Degree Bends using VTube-LASER v2.9.20
Using VTube-LASER to Correct an SMT Remanfactured VB300 Bender
Major Innovations that Make VTube-LASER Unique


Invented in 2021
VTube END SCAN FLIER FILTER
This new invention was released on June 22, 2021. It is a powerful filter that removes flier points from end scans automatically in order to ensure that the end scans are rock solid.
With the new filter comes an End Scan Quality window that indicates how well the end scan performed - and whether VTube accepts or rejects the end scan.
The Flier Filter is designed to look for END WALLS and separate them from points in the cloud that do not make good end-wall points.
Testimonial from a VTube-LASER Operator
"The end flier filter add-on to the software in my opinion is a real game-changer at least with the type of tubing we use. I think it is impossible or seems to be anyways to get a bad reading on the end lengths with that enabled. I had made some solid end caps to measure endpoints before the update because I wasn’t that confident in the reading I was getting without them.
Since the update, I no longer use the caps and when measuring a tube I feel 1000% confident that the endpoints will be correct. Like I said it’s a game-changer especially as far as thin wall tubing is concerned. Thanks again for all you do!"
Invented in 2020
VTube BEND PROFILE RINGS
Even though VTube-LASER can calculate and qualify the centerline radius - it isn't usually what customers need to qualify. Rather, the location of the bend profile walls in space relative to the nominal bend profile walls is very important - and needs to be qualified in some applications.
We refer to this space as the "Bend Profile Envelope." Bend profile envelopes are represented in VTube-LASER as simple bend profile RINGS - each with 4 points that surround the center of each bend. Then it becomes simple to compare four points extracted from the scanned data with the 4 nominal points in the bend profile ring.
This feature is packed with power: VTube-LASER allows you to scan inside the bend, inside and outside, and inside/outside/top/bottom. If you scan just the inside, then that is the part of the ring that is compared. It calculates the location of the outer most point in the ring, the bend radius, the in-plane change (for flattening), and the perpendicular plane change for Ovality% and OOR% (your choice). We include every useful attribute for qualification of a bend profile.



Invented in 2020
VTube SCAN SCORE
In VTube-LASER v3, we've added a way to allow users to know if their cylinder scan technique is reasonably consistent with a historical database of tube cylinder scans.
The overall scan score is a composite value from VTube-LASER including wobble deviation, cylindricity, out-of-round%, nearpass deviation, and dual cylinder fit uncertainty.
The score value is a percentage where 100% is perfectly consistent. Over 100% shows a better scan than usual. If a score is much lower than 100% then the operator is warned that something may be wrong. He/she may be wise to rescan the part to be sure that the new lower number is the new score norm.
Invented in 2020
VTube SOLIDWORKS BUILDER with Automated Drawings
Based on customer feedback, we've enhanced the SOLIDWORKS BUILDER feature in VTube-LASER v3. Customers requested that we allow VTube-LASER to not only build the parametric part - but also the orthographic drawing based on that part.
The automatic drawings include one, two, or three views, balloons that point to the intersection points, the XYZ blocks, and the LRA (bender data) blocks.
Invented in 2018
MTA (MEASURED TUBE AVERAGING)
We worked with one our customers (MEC, Inc.) to perfect averaging of multiple tube measurements - and performed tests on when MTA is important to use. The MTA feature can average any number of tube measurements together easily.
We have customers that now make MTA a required standard process for measuring all large diameter tubes. This feature is so important that we added the ability for technicians to set up VTube-LASER to require users to use MTA measurements.
Invented in 2017
DCF (DUAL CYLINDER FIT)
One of our most important breakthrough inventions is the DCF feature.
This feature measures the tube twice when you measure it once and then reports an absolute uncertainty value that helps you know for sure that the last cylinder measurement is good. If the value is too high, then VTube-LASER asks you to remeasure the same straight again.
Invented in 2016
DCP (DIAMETER CUT PLANE)
The DCP feature was invented to allow VTube-LASER to measure tubes or wires that either turn back on themselves or they are in crowded environments. Examples would be small wire-bent parts or exhaust headers.
Invented in 2012
REAL-TIME CYLINDER FIT TEST
Every cylinder that is scanned is required to pass a 5-level cylinder test that ensures that the surface points and calculation are excellent before moving to the next scan.
-
Wobble Deviation: The math engine reports this value to indicate how much potential wobble it expects in deviation in the centerline of the cylinder. The smaller the number, the better.
-
Cylindricity: This is an actual measurement of the distance between the highest point and the lowest point in the cloud relative to the centerline.
-
Out-of-round%: Every tube cylinder is out of round. This shows how how much out-of-round the cylinder is. For example 1.5% means that it is 98.5% round.
-
Near Pass: This shows how near the two 3D lines are when they intersect.
-
DCF Uncertainty: This splits the odd stripes and the even stripes then calculates two centerline end points for comparison to each other to report what mathematicians call the absolute uncertainty value.